濟南恒信新能源汽車教學設備
一站式采購加工 運營18年 質量保證

全國客服熱線:
0531-88914116
13455126350
0531-88914116
13455126350
價格:2.1-10萬
功能:V2X微縮沙盤展示
產品型號:hx-v2xwsspjzdjsxc-366*962
廠家定制:加工定制
起訂量:1臺起
作者:汽車教學設備 來源:無人駕駛汽車教學設備
發布時間:2022-01-18 11:47:59 閱讀次數:771
電話:13455126350
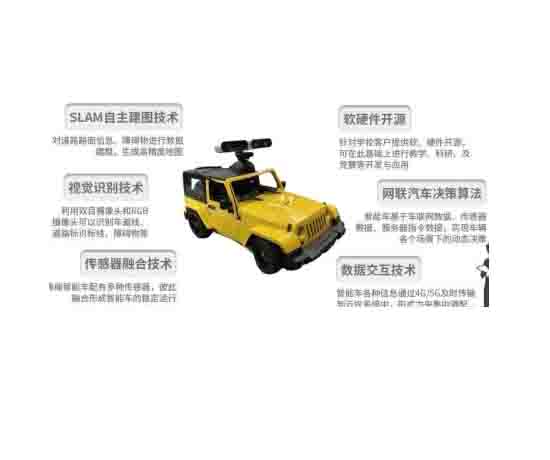
V2X微縮沙盤及自動駕駛小車實驗臺融合激光雷達、IMU、輪速計等傳感器,構建柵格地圖,基于視覺slam構建三維點云地圖,將激光slam柵格地圖與視覺slam點云地圖融合,實現厘米級定位與導航,下面由小編為您詳細介紹!
1.阿克曼前輪轉向機構;
2.輪速計;
3.陀螺儀;
4.算法板 Jetson Nano;
5.智能鋰電池 5600mah;
6.深度相機intel realsenseD435;
7.激光雷達默EAI X4,可適配思嵐A1,A2,A3,S1等多數激光雷達;
8.GPS+北斗模塊:(考慮室內GNSS信號弱,可由多相機動態捕捉定位系統或超寬帶定位系統代替,可根據具體環境選換。);
9.配無線遙控器;
10.負載5kg;
11.長寬高:460*210*220mm;
12.速度1.2米/秒;
1.模擬GNSS定位功能
針對室內GPS/北斗信號弱的情況。
方案一:基于室內動態捕捉技術,通過多個位于不同方位的攝像頭,實現對整個智慧交通仿真沙盤區域的各要素定位信息的覆蓋,移動定位精度低于1cm,實現對移動中的車輛高精度定位。從原理及數據層面,模擬GPS全球定位系統定位機制及數據制式,智能小車通過車載定位系統,接收來自3個以上衛星(攝像機)的距離信息以及攝像頭方位信息,進行聯合定位及航向確定,并通過終端系統將位置信息及航向信息發送給小車,實現車-服務器的通訊,指引小車行駛。
方案二:部署超寬帶定位基站,由超寬帶定位代替GNSS實現小車在沙盤區域中的定位,并將超寬帶定位數據與激光slam地圖匹配定位數據融合,實現精度不低于1cm的定位與導航。
2.GNSS系統+IMU+輪速計數據融合
V2X微縮沙盤及自動駕駛小車是多傳感器組合定位,基于擴展卡爾曼濾波算法實現融合導航,根據環境變化自主切換各傳感器優先級權重,增強導航與定位系統魯棒性。
3.自主路徑規劃與導航
根據設定起止位置,小車自主進行全局路徑規劃,基于快速隨機搜索樹等算法實現小車自主避障等局部路徑規劃。
4.靈活動態避障,可倒車避障
小車行駛過程中基于局部路徑規劃算法根據路況自主路徑規劃,自主識別障礙物特征,并根據障礙物特征實現自主調速、繞彎、倒車等機動動作。運動控制誤差不大于3cm。
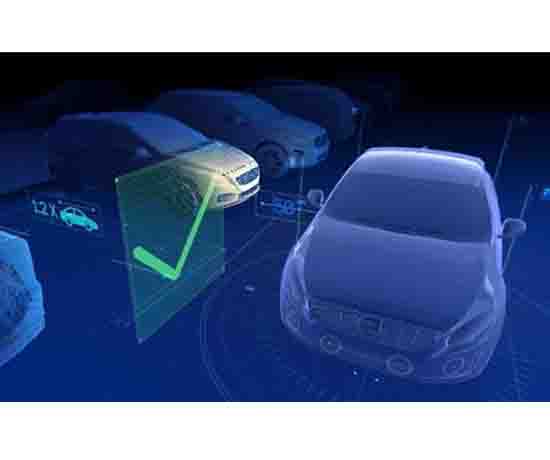
5.紅綠燈、常見交通標識視覺識別
基于卷積神經網絡對紅綠燈、常見交通標識進行實時視覺識別,處理器同步控制小車做出停車等相應動作。
6.電池電壓實時監控,低壓報警,自主充電
實時監測小車電池狀態,當監測到電池電壓過低時,小車自主尋找無線充電樁,自主充電。
7.綠波巡航演示
云控系統根據小車行車狀態信息上傳和路側端路況信息感知,控制交通信號燈合理配時,實現多輛沙盤小車的綠波巡航功能演示。
8.路側攝像頭視頻監控與車載實時行車記錄儀圖像傳輸模塊
路側端部署攝像頭視頻監控系統,實時向后臺顯示系統傳輸路況影像信息,同時各小車向后臺云系統實時傳輸前向行駛環境影像及單車行車狀態參數。
9.周邊車輛間車車通信傳感模塊
通過Wi-Fi、Zigbee等無線通信手段進行車與車間的通信。車與車間實現信息交流與信息共享,包括車輛位置、行駛速度等車輛狀態信息,可用于判斷鄰車安全距離、道路車流狀況等信息
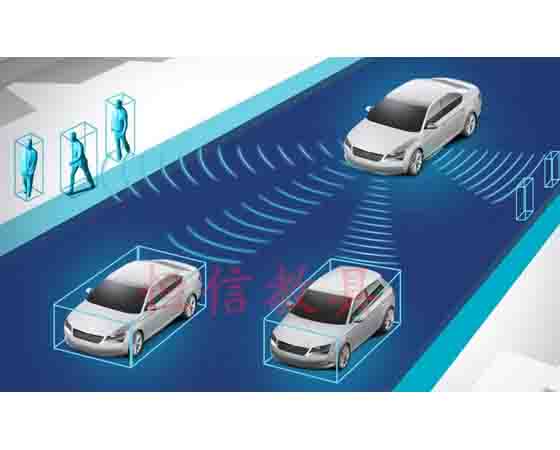
10.車載近距預警及ADAS模塊程序,自主換道、自主超車
車載紅外線(雷達)傳感器模塊等距離探測傳感器。實時感知鄰車及路況距離信息,由ADAS模塊分析傳感器信息并根據行車路況,每輛小車根據自己的初始設定任務,實現自主剎車、自主換道、自主加速超車等主動安全控制,超車后,自主并線到原來車道。
11.車載ETC模塊
小車內綁定IC卡的發射設備,IC卡為小車身份卡。小車進入沙盤高速路時進行不停車快速自動收費,當車輛接近收費站臺時,通過收費站臺上的傳感器設備獲取車輛內的電子標簽并扣取其中的費用。扣取完通行費用后感應抬桿器自動將欄桿抬起。
以上內容就是介紹的V2X微縮沙盤及自動駕駛小車:http://m.gdjinyls.com/xb-wr/1106.html;希望對訂購無人駕駛汽車教學設備的朋友們有所幫助,可能會出現介紹錯誤,看到請馬上聯系我們改正,想了解其中更多內容以及行情資訊,歡迎收藏本站,也可電話聯系我們索要設備的功能參數等,或者直接實地考察,也可電話微信溝通訂購等!