
濟(jì)南恒信新能源汽車教學(xué)設(shè)備
一站式采購加工 運(yùn)營18年 質(zhì)量保證

全國客服熱線:
0531-88914116
13455126350
0531-88914116
13455126350
價(jià)格:1.17-4.2萬/臺(tái)
功能:無人駕駛車輛轉(zhuǎn)向控制教學(xué)
產(chǎn)品型號(hào):hx-qrjsclkzcssyt-18*23/7
廠家定制:加工定制
起訂量:1臺(tái)起
作者:admin 來源:無人駕駛汽車教學(xué)設(shè)備
發(fā)布時(shí)間:2020-03-23 17:13:38 閱讀次數(shù):103
電話:13455126350
無人駕駛電動(dòng)轉(zhuǎn)向控制測試與開發(fā)實(shí)驗(yàn)平臺(tái)與傳統(tǒng)的液壓助力轉(zhuǎn)向系統(tǒng)相比,電動(dòng)助力轉(zhuǎn)向系統(tǒng)具有節(jié)能、環(huán)保和助力能量隨車速變化的優(yōu)點(diǎn),已成為現(xiàn)代轉(zhuǎn)向系統(tǒng)的主要研究方向,下面小編為您詳細(xì)介紹!
對于智能車來說,如果只根據(jù)電動(dòng)助力轉(zhuǎn)向的角度信號(hào)來控制方向盤的角度,而不控制電動(dòng)助力轉(zhuǎn)向電機(jī)的輸出扭矩,方向盤就會(huì)抖動(dòng)。在方向盤大角度轉(zhuǎn)向時(shí),如果不控制電動(dòng)助力轉(zhuǎn)向電機(jī)的阻尼(反向扭矩),方向盤會(huì)調(diào)整過快,導(dǎo)致車身偏航率較大,這將惡化車輛的轉(zhuǎn)向品質(zhì),甚至導(dǎo)致高速行駛時(shí)轉(zhuǎn)向不穩(wěn)定,從而危及行車安全。
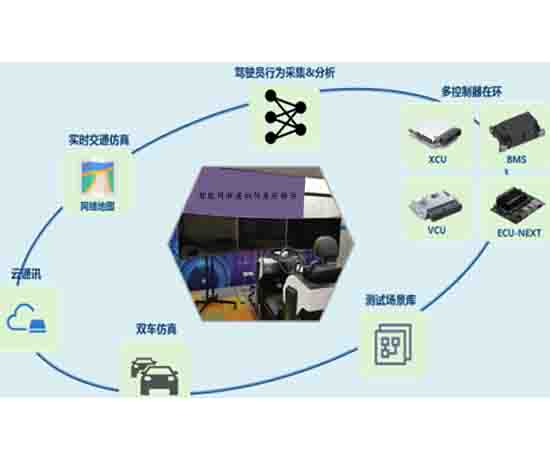
因此,如何使智能車輛在自動(dòng)駕駛模式下的轉(zhuǎn)向控制質(zhì)量盡可能地接近人類駕駛員的轉(zhuǎn)向控制,是智能車輛轉(zhuǎn)向控制系統(tǒng)研究領(lǐng)域的一個(gè)重要課題。本文從以下幾個(gè)方面進(jìn)行了研究:熟練駕駛員在道路上駕駛過程中轉(zhuǎn)向控制參數(shù)的采集和特性分析,熟練駕駛員駕駛軌跡的非線性擬合,基于模型預(yù)測控制的智能車輛駕駛員模型的構(gòu)建,基于仿人智能理論的轉(zhuǎn)向控制策略,基于新型電動(dòng)助力轉(zhuǎn)向裝置的智能車輛仿人轉(zhuǎn)向控制試驗(yàn)臺(tái)的開發(fā)和實(shí)驗(yàn)驗(yàn)證。
主要工作如下:對熟練駕駛員在道路上的轉(zhuǎn)向試驗(yàn)數(shù)據(jù)進(jìn)行收集和分析,選擇5名熟練駕駛員在不同車型、車速和轉(zhuǎn)向條件下進(jìn)行實(shí)車道路轉(zhuǎn)向試驗(yàn),采集轉(zhuǎn)向特性參數(shù)和車輛動(dòng)力學(xué)參數(shù)。
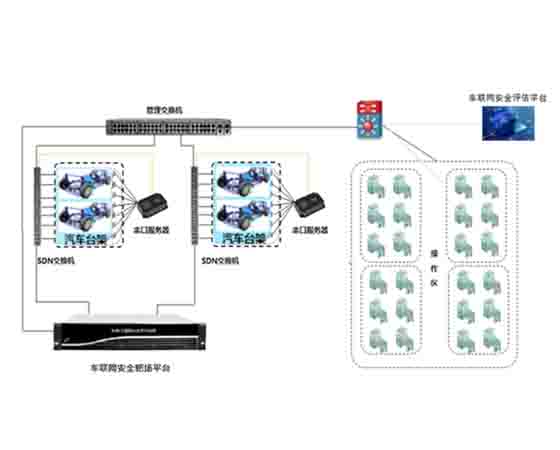
試驗(yàn)臺(tái)的控制策略是電動(dòng)助力轉(zhuǎn)向系統(tǒng)研究的核心,直接影響汽車的行駛安全性和操縱穩(wěn)定性,電動(dòng)助力轉(zhuǎn)向控制器的研究和開發(fā)是一個(gè)漫長而反復(fù)的過程。如何提高電動(dòng)助力轉(zhuǎn)向系統(tǒng)的穩(wěn)定性,縮短控制器的研發(fā)周期,是整個(gè)電動(dòng)助力轉(zhuǎn)向系統(tǒng)研究的關(guān)鍵,也是電動(dòng)助力轉(zhuǎn)向產(chǎn)業(yè)化的前提和必要條件。
通過建立電動(dòng)助力轉(zhuǎn)向快速控制的原型仿真平臺(tái),可以實(shí)時(shí)驗(yàn)證和修改電動(dòng)助力轉(zhuǎn)向控制策略,大大縮短了電動(dòng)助力轉(zhuǎn)向系統(tǒng)的開發(fā)周期;主要研究內(nèi)容如下:根據(jù)電動(dòng)助力轉(zhuǎn)向系統(tǒng)的結(jié)構(gòu)和工作原理,設(shè)計(jì)了線性助力特性曲線。對于助力電機(jī)控制器的設(shè)計(jì),提出了一種基于PID和滑模變結(jié)構(gòu)算法的助力控制策略。針對助力系統(tǒng)助力過程中轉(zhuǎn)向不足的現(xiàn)象,設(shè)計(jì)了一種基于PID算法的助力控制策略。
基于車輛操縱動(dòng)力學(xué)模型對整個(gè)電動(dòng)助力轉(zhuǎn)向系統(tǒng)進(jìn)行了分析,利用MATLAB/Simulink軟件建立了電動(dòng)助力轉(zhuǎn)向系統(tǒng)各部分的仿真模塊,并對PID和滑模變結(jié)構(gòu)控制策略和回程控制策略進(jìn)行了仿真分析。仿真結(jié)果表明,采用滑模變結(jié)構(gòu)控制的電動(dòng)助力轉(zhuǎn)向系統(tǒng)比采用PID控制的電動(dòng)助力轉(zhuǎn)向系統(tǒng)更穩(wěn)定,采用PID反饋算法的電動(dòng)助力轉(zhuǎn)向系統(tǒng)反饋速度更快,基本消除了殘余角。
通過MATLAB和CarSim的聯(lián)合仿真分析,最終的聯(lián)合仿真曲線證明本文設(shè)計(jì)的電動(dòng)助力轉(zhuǎn)向系統(tǒng)能夠?yàn)轳{駛員提供合適的轉(zhuǎn)向助力,提高汽車的轉(zhuǎn)向輕便性。最后,利用dSPACE搭建了電動(dòng)助力轉(zhuǎn)向系統(tǒng)快速控制原型仿真試驗(yàn)臺(tái),并對助力控制算法和返回性能進(jìn)行了半實(shí)物實(shí)時(shí)仿真測試。
以上內(nèi)容就是介紹的無人駕駛車輛轉(zhuǎn)向控制測試試驗(yàn)臺(tái):http://m.gdjinyls.com/xb-wr/603.html,希望對訂購無人駕駛教學(xué)設(shè)備的朋友們有所幫助,可能會(huì)出現(xiàn)介紹錯(cuò)誤,看到請馬上聯(lián)系我們改正,想了解其中更多內(nèi)容以及行情資訊,歡迎收藏本站,也可電話聯(lián)系我們索要設(shè)備的功能參數(shù)等,或者直接實(shí)地考察,也可電話微信溝通訂購等!




添加微信
可微信咨詢
全國免費(fèi)服務(wù)熱線
134-5512-6350